Donate
DonateOptimizing a Voxel Engine for Performance
Voxel engines require handling massive amounts of data in real time, making optimizations essential for maintaining smooth gameplay. Below is an overview of the key optimizations that can drastically improve the performance of a voxel engine.
Mesh Culling
Mesh culling is a fundamental optimization technique for voxel engines. In any given scene, many voxels are hidden behind other voxels, making them unnecessary to render. The goal of mesh culling is to remove these hidden faces from the rendering pipeline to reduce the overall number of polygons.
The process involves determining which faces of a voxel are exposed and visible to the player. Faces that are completely enclosed by neighboring voxels are culled from the rendering process. This ensures that only the visible faces of each voxel are drawn, which significantly reduces the number of triangles and vertices sent to the GPU.
Additionally, mesh culling works in tandem with other culling techniques, such as back-face culling, where only the front-facing polygons relative to the camera are rendered. This results in more efficient rendering, especially in densely packed voxel environments like caves or underground structures.
Greedy Meshing
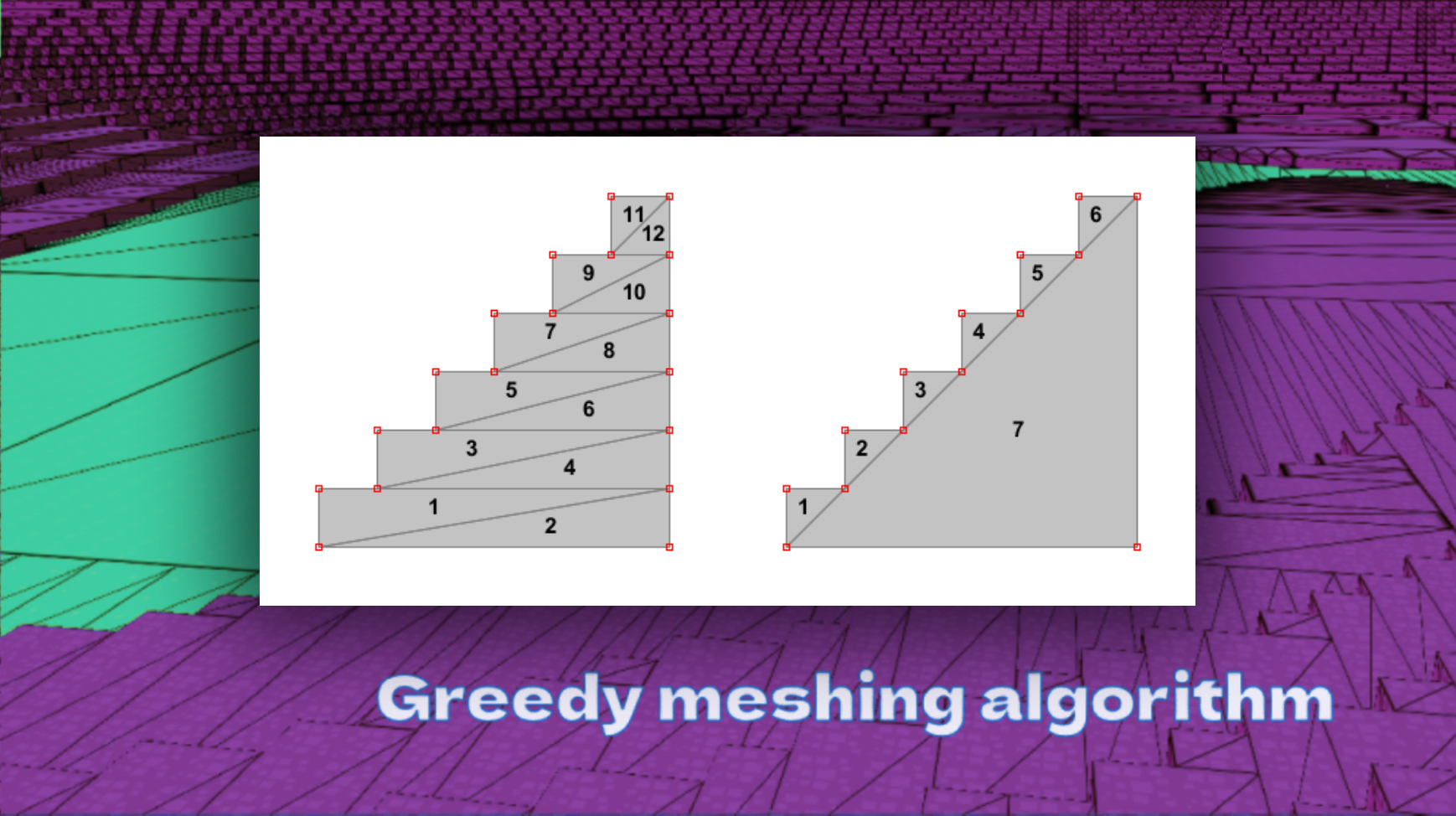
Greedy meshing is an advanced optimization technique that reduces the number of draw calls by merging adjacent voxels of the same type into larger surfaces. Instead of treating each voxel as an individual cube, greedy meshing combines adjacent faces to form larger polygons, thereby minimizing the total number of polygons needed to render a scene.
This approach is particularly useful for flat surfaces such as floors, walls, or ceilings, where contiguous blocks can be grouped together. The algorithm works by scanning through the voxel grid and identifying stretches of blocks that can be merged. Instead of rendering each voxel’s individual faces, it replaces them with a single large face, greatly reducing vertex and polygon counts.
Greedy meshing not only optimizes performance by lowering the number of draw calls but also reduces memory usage by minimizing the number of vertices that need to be stored. This optimization is particularly effective in areas with many identical voxels, leading to smoother rendering and faster load times.
Frustum Culling
Frustum culling is a powerful technique that eliminates the need to render objects outside the player’s current field of view. The camera’s frustum defines a pyramidal volume in 3D space that represents what the player can see. By using frustum culling, the engine can skip rendering chunks or blocks that are completely outside this volume.
The engine first calculates which chunks or objects intersect with the viewing frustum. Chunks that do not intersect the frustum are ignored, while only those within or partially within the frustum are rendered. This saves both CPU and GPU resources by focusing only on the relevant portions of the world, especially in large, open environments.
Frustum culling is particularly effective in voxel engines where vast amounts of the world can be generated but only a small fraction is visible at any time. By leveraging this technique, the engine reduces unnecessary draw calls, allowing for smoother performance and more complex worlds to be rendered without overwhelming the system.
Octrees for Spatial Partitioning
Octrees are a hierarchical data structure used to manage spatial partitioning in 3D environments. In a voxel engine, the world is divided into smaller, more manageable chunks, and octrees help organize these chunks in a way that allows the engine to efficiently determine which chunks need to be rendered at any given time.
In an octree, the world is recursively divided into eight smaller cubes, or "octants," each representing a section of the world. This hierarchical approach makes it easy for the engine to quickly locate the chunks that intersect with the player’s view or the camera’s frustum. If an entire section of the octree contains no visible voxels, it can be skipped entirely during rendering.
By using octrees, the engine can avoid rendering empty or distant sections of the world, which optimizes both memory usage and rendering performance. This is especially useful in large voxel worlds where not all chunks are populated, and only a subset of the world needs to be processed at any given time.
Multithreading
Multithreading is an optimization that allows the engine to perform multiple tasks simultaneously across different processor cores. In a voxel engine, tasks such as chunk generation, physics simulations, and lighting calculations can be offloaded to separate threads, allowing the main rendering loop to focus solely on drawing the scene.
By distributing computational tasks across multiple threads, the engine can handle more complex operations without causing delays in rendering. For example, chunk loading and unloading can happen in the background while the player continues exploring the world, ensuring a seamless experience with no noticeable lag or stuttering.
Multithreading is particularly useful in voxel engines with dynamic environments where large amounts of data need to be processed in real time. By making use of modern multi-core processors, this technique ensures that even the most resource-intensive tasks are handled efficiently, leading to smoother gameplay and faster loading times.